 Asimov v1 Projesi
Asimov v1 Projesi
Asimov v1, herkesin kendi imkanlarıyla üretebileceği, eğitebileceği ve kişiselleştirebileceği açık kaynak kodlu (open-source) iki ayaklı bir insansı robottur. Proje; donanım, yazılım ve simülasyon süreçlerini tamamen topluluğa açık bir şekilde sunarak insansı robot teknolojisine erişimi kolaylaştırmayı amaçlar.
Öne Çıkan Fiziksel Özellikleri:
-
Boy / Ağırlık: 1.2 metre boyunda ve 35 kg ağırlığındadır.
-
Hareket Kabiliyeti: Toplamda 25 adet motorlu (hareketli) ve 2 adet pasif eklem hareket serbestliğine (DOF) sahiptir. Bacaklarında 12, ayak parmaklarında 2 adet eyleyici bulunur.
GitHub Deposunun (asimov-1) İçeriği:
Bu depo, robotun sıfırdan inşa edilebilmesi için gerekli olan tüm ana kaynakları içerir:
-
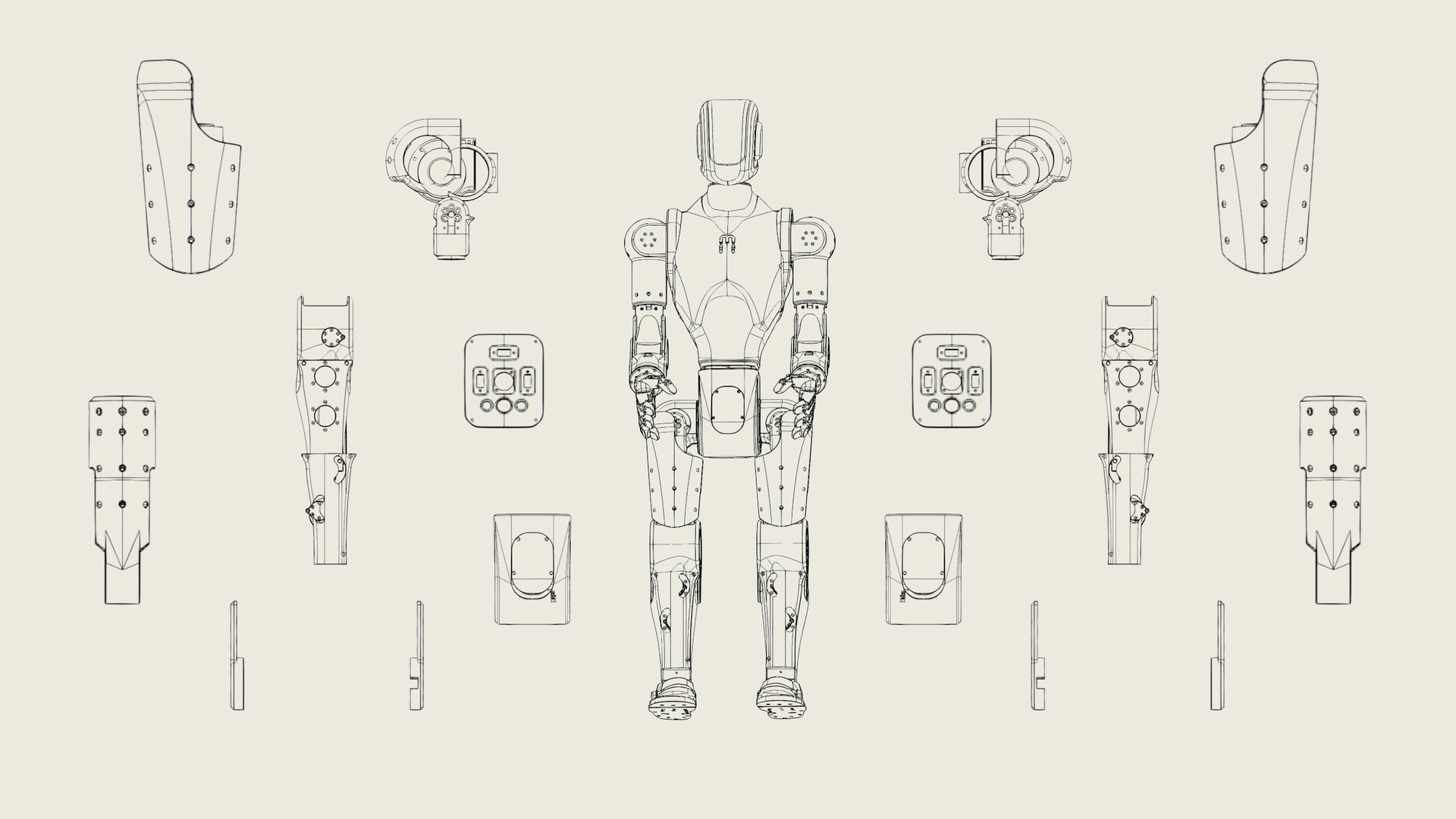
Mekanik CAD Dosyaları: Robotun fiziksel gövdesini oluşturan 7 alt montaj grubunun çizimleri.
-
Elektronik Devreler: Kablo şemaları ve PCB (Baskı Devre Kartı) dosyaları.
-
Simülasyon Modeli: Robotun fiziksel dünyaya aktarılmadan önce dijital ortamda eğitilmesi için MuJoCo tabanlı simülasyon modeli.
-
Yerleşik Yazılım (Onboard Software): Robotun motorlarını, sensörlerini ve hareket politikalarını yöneten temel Python ve Shell kodları.
Nasıl Temin Edilir / İnşa Edilir?
-
Kendin Üret (Self-source): Tüm malzeme listesini (BOM) projeden çekerek parçaları kendi imkanlarınızla üretebilir ve birleştirebilirsiniz.
-
Kendin Yap Kiti (DIY Kit): Geliştirici ekibin sunduğu, montaj kılavuzu ve gerekli tüm bilgisayar kartları (Raspberry Pi tabanlı ara birimler), motorlar ve sensörlerle (kamera, IMU vb.) birlikte gelen hazır montaj kitini rezerve edebilirsiniz.
 Asimov v1 Project
Asimov v1 Project
Asimov v1 is an open-source, bipedal humanoid robot designed to be built, trained, and customized by developers, researchers, and hobbyists worldwide. Developed under Menlo Research, the project aims to democratize embodied artificial intelligence by providing accessible hardware and software co-designs.
Key Technical Specifications:
-
Height / Weight: It stands 1.2 meters tall and weighs 35 kg.
-
Degrees of Freedom (DOF): Features 25 actuated and 2 passive degrees of freedom, including 6 DOF per leg and 2 toe actuators.
What the GitHub Repository (asimov-1) Contains:
The repository serves as a complete blueprint for building and simulating the robot, containing:
-
Mechanical CAD: Detailed 3D models for the 7 structural subassemblies.
-
Electrical Engineering: Complete wiring harness layouts, schematics, and PCB files.
-
Simulation Model: A MuJoCo physics simulation environment to train and evaluate locomotion policies digitally before deploying them to the real world (sim-to-real transfer).
-
Onboard Software: Code components primarily written in Python to control robot movements, sensor processing, and system operations.
Deployment Options:
-
Self-source: Users can download the full Bill of Materials (BOM) and build everything from scratch independently.
-
DIY Kit: A pre-orderable, unassembled kit including structural components, compute boards (Raspberry Pi edge, motion control, power distribution), and basic sensors (monocular camera, IMUs, mic/speakers).